商品の説明
MXL-RX62H receiver 1104 brushless motor 7A ESC 2S power system FUTABA SFHSS
この2S(7.4V)パワーシステムの推力は約120gで、1104モーター、2S用の7A ESCが使用されています。バッテリーを除いた重量は18グラムです。
GWS5030プロペラを使用したテストデータは以下の通りです:
電圧7.4V、推力98g、効率4.65g/w
電圧8.0V、推力110g、効率4.43g/w
電圧8.4V、推力119g、効率4.15g/w
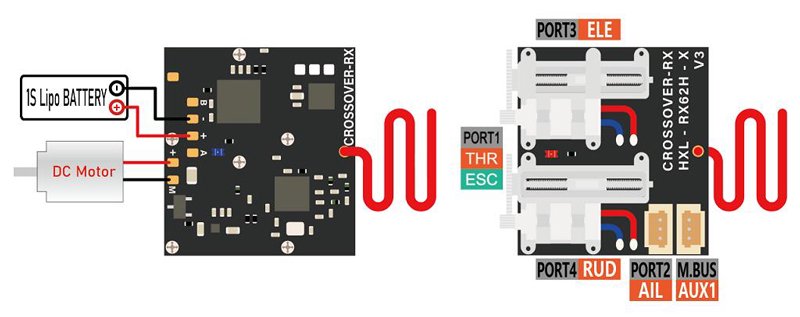
MXL-RX62H-Xレシーバーに関する説明:
MXL-RX62H-X-G V3.1シリーズのレシーバーは、マイクロモデル飛行機用に新たに設計され、以下の機能が統合されています:
2つのリニアサーボ
外部から接続するための2つの独立したサーボポート
ブラシレスESC信号用のポートとSR3X 3軸用のポート
このシリーズのレシーバーは非常に軽量で小型であり、顧客はそれらを非常に簡単にマイクロモデル飛行機に取り付けることができます。5つのバージョンがあり、一部はTELEM機能をサポートしています。
特徴:
超小型: アンテナを除いた寸法 24.3mm x 24.0mm x 7.8mm
超軽量: 電源ケーブルを含む重量 3.5g
動作電圧: 3.0〜5.0V
ビルトインの5A/1SブラシESC(スタートロック機能付き)
SR3X 3軸統合(オフ、低感度、高感度の3つの動作モード)
自動バインディング
オンラインファームウェアの更新をサポート
GUI設定をサポート
内蔵ブラシESCのスタートロック機能:
スタートロック機能は、ブラシモーターが誤って起動しないようにするためのものです。この機能に従うと、レシーバーが電源を供給されたとき、スロットルスティックの位置変更に応じてブラシモーターは動作しません。
スロットルスティックが約2秒間最低位置に保たれると(LEDライトが約2秒間暗くなり、その後明るくなります)、スタートロックが解除され、スロットルスティックが上方に押されるとモーターが動作します。
自動バインディング操作:
レシーバーが胴体内に取り付けられている場合、バインディングボタンを押すのは少し難しいことがあります。この場合、自動バインディング機能を開発しました。
レシーバーが電源を供給されてから15秒経過しても信号がない場合、レシーバーは自動バインディングモードに入ります(ゆっくり点滅するLEDライトが速く点滅に変わります)。顧客は、自分の送信機の指示に従ってバインディング操作を完了できます。
TELEM機能:
TELEM機能は、バッテリー電圧、レシーバーの動作電圧、信号強度、および動作温度をリアルタイムでモニタリングするのに役立ちます。これにより、顧客はレシーバーとバッテリーの動作状態をコントロール下に保ち、制御範囲外での飛行や過放電の発生が少なくなります(ブラシレスモーターの回転速度や飛行高度のモニタリングには、より高度なレシーバーを選択する必要があります)。
注意: TELEM機能の効果的な制御範囲は、送信機に依存します。レシーバーの作動範囲がTELEM機能の有効範囲をはるかに超えることがあるが、これは正常です。
SR3X 3軸機能と操作:
SR3Xは、特に固定翼模型飛行機向けに開発された飛行支援システムです。これは初心者がモデル飛行機を制御するのに役立つだけでなく、経験豊富なパイロットがより良い安定した飛行姿勢を得るのにも役立ちます。
SR3X 3軸には、シャットオフ、低感度動作モード、高感度動作モードの3つの動作モードがあります。
顧客は、送信機の3段スイッチでCH5を設定でき、それによって動作モードを決定します。MXL-RX62E-X-Gの青いLEDは動作モードを示すために使用されます:
シャットオフは、SR3X 3軸がオフになっていることを示します。
明るい青いLEDが点灯していると、低感度モードを示します。
点滅するLEDは、高感度モードを示します。
M-BUSポート:
M-BUSポートは、以下の多機能ポートです:
ファームウェアの更新/機能設定
CH5信号出力
SBUS信号出力
外部センサーの接続(開発中)
レシーバーをGUIソフトウェアに接続する方法:
顧客は、設定やファームウェアの更新の前にGUIソフトウェアを使用するためにUSBプログラマーが必要です(USB MX-PG02、MXL-RX62H-X-Gで使用可能、スイッチをlの位置に設定)。
ケーブルの一方の端をレシーバーのM-BUSポートに接続し、もう一方の端をPCに接続し、GUIソフトウェアを開いて正しいポートを選択し、"Connect"をクリックすると、レシーバーのすべての機能モジュールがアップロードされ、現在の設定情報が表示されます。
異なる種類の飛行機に対する設定:
Normal-> 飛行機の通常のレイアウト
Single Power Wing-Normal-> シングルパワーウィング(同相のサーボを使用、例: リニアサーボ)
Single Power Wing-Reverse -> シングルパワーウィング(逆相のサーボを使用、例: ローテーションサーボ)
V-Tail-Normal-> シングルパワーVテールプレーン(同相のサーボを使用、例: リニアサーボ)
V-Tail-Reverse-> シングルパワーVテールプレーン(逆相のサーボを使用、例: ローテーションサーボ)
SR3X 3軸の設定:
SR3X Control Mode: OFF-> SR3Xがオフになります。
SR3X SENSE-1 -> SR3XがSR3X SENSE-1モードで動作します。
SR3X SENSE-2 -> SR3XがSR3X SENSE-2モードで動作します。
AUX1 (CH5)-> SR3Xの動作モードはAUX1 (CH5)で設定されます。
AUX1 (CH6)-> SR3Xの動作モードはAUX1 (CH6)で設定されます。
AUX1 (CH7)-> SR3Xの動作モードはAUX1 (CH7)で設定されます。
AUX1 (CH8)-> SR3Xの動作モードはAUX1 (CH8)で設定されます。
SR3X SENSE-1:感度モード1でのXYZ感度度を設定します。範囲は0-125です(軸の感度値が0の場合、軸をオフにすることができます)。
SR3X SENSE-2:感度モード2でのXYZ感度度を設定します。範囲は0-125です(軸の感度値が0の場合、軸をオフにすることができます)。
SR3X Mounting Type: Horizontal -> レシーバーは飛行機の水平位置に取り付けられます。
Flank-> レシーバーは飛行機の側面または垂直位置に取り付けられます。
X-AXIS DIR: Normal -> X軸は通常の方法でサーボサーフェスを調整しています。
Reverse -> X軸は逆方向でサーボサーフェスを調整しています。
Y-AXIS DIR: Normal -> Y軸は通常の方法でサーボサーフェスを調整しています。
Reverse -> Y軸は逆方向でサーボサーフェスを調整しています。
Z-AXIS DIR: Normal -> Z軸上のGYROは通常の方法でサーボサーフェスを調整しています。
Reverse -> Z軸上のGYROは逆方向でサーボサーフェスを調整しています。
サーボサイクルの設定:
サーボの出力信号サイクルを設定します。信号サイクルの範囲は10〜22msです。サーボが過熱したり、振動したりする場合、範囲を増やすかデジタルサーボを使用することができます。
M-BUS.TXの出力信号を設定:
SBUS-> ポートM-BUS.TXからSBUS信号が出力されます。
SERVO -> ポートM-BUS.TXからPWMサーボ信号が出力されます。
出力チャンネルの設定:
出力チャンネルを設定します。
Normal -> 通常の出力を示します。
Reverse-> 逆の出力を示します。
7A ESCの仕様:
定格電流: 7A
バースト電流: 8A
バッテリー: 2-3S Lipoly / 5-8s NiXX
BEC(バッテリー消費電力供給): 5V / 0.5A
モータータイプ: センサーレスブラシレス
サイズ: 22x6x13mm
重量: 5.2g
セット内容:
1xMXL-RX62H receiver (Futaba SFHSS)
1x7A brushless ESC
1x5g 1104 brushless motor
1xGWS5030 propeller
1xMotor mount
1x Prop saver
Related plug and connectors


![GNB 550mah 7.6V 2S 100C HV リポバッテリー XT30 Plug [FB-6953390]](https://img15.shop-pro.jp/PA01085/133/product/171339164_th.jpg?cmsp_timestamp=20221107165958)

![5V アクティブミニブザー 超薄型,9mm x 4.2mm [LA]](https://img15.shop-pro.jp/PA01085/133/product/170287603_th.jpg?cmsp_timestamp=20220908170209)
![Gemfan Hurricane 51466-3 MCK V2 (2 Pairs) []](https://img15.shop-pro.jp/PA01085/133/product/164581476_th.jpg?cmsp_timestamp=20211104234222)
![Betafpv 5.8G VTX FPV Dipole Whip Antenna for Micro Meteor65/75 (1pcs) [BF-]](https://img15.shop-pro.jp/PA01085/133/product/156716729_th.jpg?cmsp_timestamp=20210112114232)



![BETAFPV Pavo Pico Brushless シネフープドローン ELRS 2.4G [BF-OP]](https://img15.shop-pro.jp/PA01085/133/product/177245049_th.jpg?cmsp_timestamp=20240309095702)
![QIDI-550 SWIFT-ONE Sky Challenger 505mm Wingspan RC Airplane BNF SFHSS [FB-7166285]](https://img15.shop-pro.jp/PA01085/133/product/177417483_th.jpg?cmsp_timestamp=20231003142722)

![BETAFPV BT2.0 フープ ケーブル ピグテール 40mm(6pcs) [BF-01130006_2]](https://img15.shop-pro.jp/PA01085/133/product/179249225_th.jpg?cmsp_timestamp=20240410153339)
